

 当前位置:
当前位置:
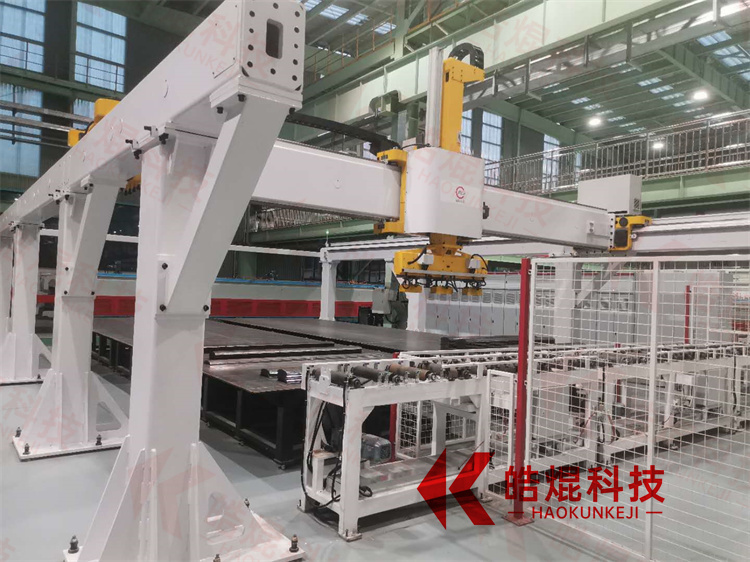
三轴分拣桁架机器人由多维机器人行走轴搭建而成。各机器人行走轴由型钢焊接而成,滚轮直线导轨和齿轮齿条及伺服电机等组成。作为运动框架和载体的型钢其截面形状通过有限元分析法来优化设计,生产中的精益求精确保其强度和直线度,采用滚轮距型导轨作为运动导轨,运动传动机构采用减速机和齿轮齿条或滚珠丝杠。
桁架机器人的空间运动是用三个相互垂直的直线运动来实现的。由于直线运动易于实现全封闭的位置控制。所以,桁架式机器人有可能达到很高的位置精度。为了实现一定的运动空间,桁架式机器人的结构尺寸要比其他类型的机器人的结构尺寸大得多,桁架式机器人的工作空间为一空间长方体。
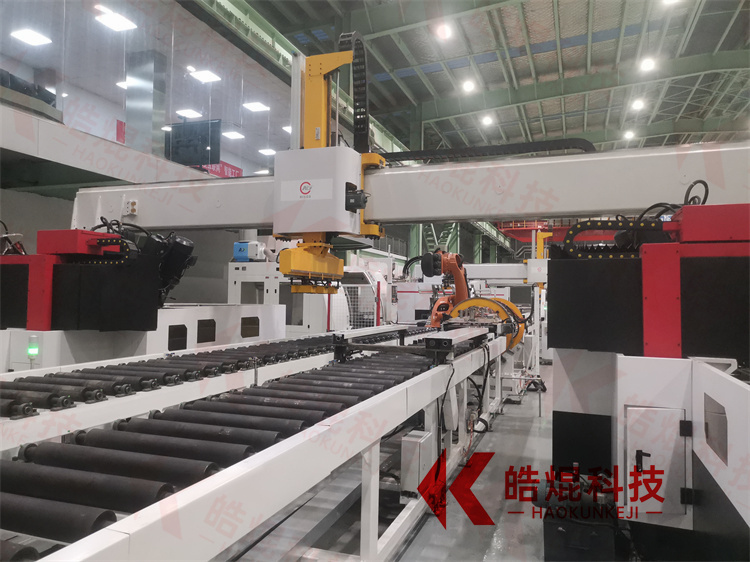
矩形导轨及硬质滚轮组合具有较高的承载能力,*高运行速度为4米/秒,具有轴向承载能力的硬质滚轮使系统能够承受轴向和径向的冲击力和意外损坏。它易于安装在任何长度的第七轴,并可提供长期和无故障的使用寿命。
滑台上的每个轴承轮可以很容易地拆下,方便装配到轨道上。这种独特的功能大大降低了安装和维护的难度。






 地址:江苏省南京市溧水区兴石南路7号
地址:江苏省南京市溧水区兴石南路7号 手机:18994052097
手机:18994052097 电话:025-57209908
电话:025-57209908 微信:
微信: